简体中文
简体中文 English
English


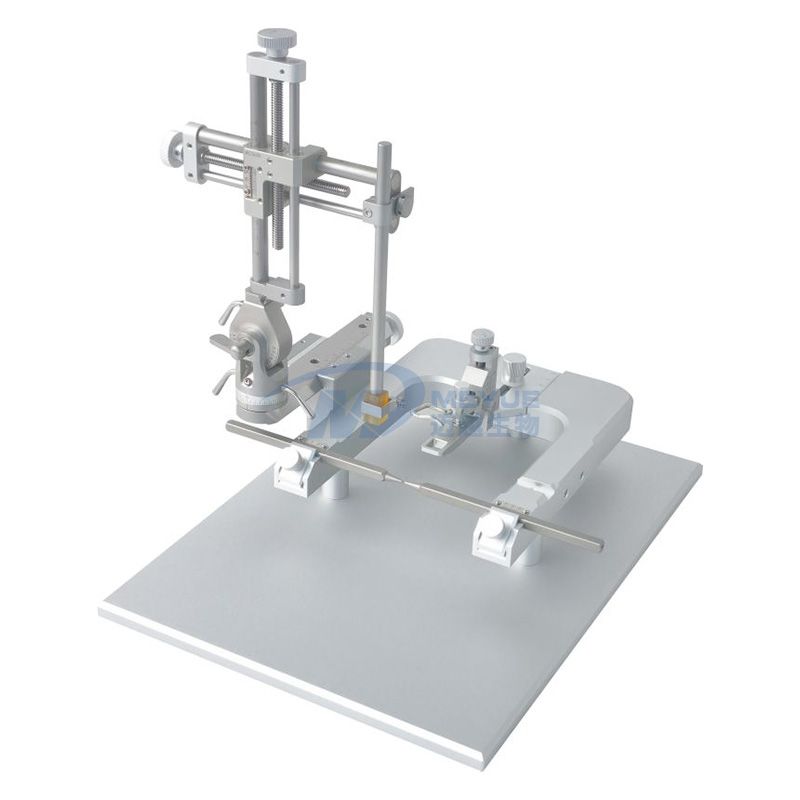
Microscopic manipulator is a precision scientific research tool mainly used for precise manipulation of small objects under a microscope. Due to its large load-bearing range and wide movement distance, glass capillary tips, electrodes, probes, or microinjection pumps can be installed on micro manipulators to perform movement operations along the X, Y, and Z axes in nm or um units under the microscope.
Commonly used in electrochemical electrode positioning, animal in vitro fertilization experiments, patch clamp experiments, extracellular signal recording, microinjection, particle capture, micro drug delivery positioning and other experiments that require precise mechanical movement. It has a wide range of applications in fields such as biology, medicine, and materials science.
Functional Features
1. Adopting rack and pinion transmission, V-shaped guide rail, and lateral ball bearing sliding to ensure that the position does not drift during movement;
2. The contact parts are all made of hard alloy steel, with good stability and long service life.
3. The three-axis reading of the vernier caliper reaches 0.1mm, and the X-axis fine adjustment vernier caliper reading is 0.01mm. Accurate three-dimensional movement and positioning operations can be performed based on the scale reading.
4. The special guide rail design allows the instrument to be stably positioned at the desired location and smoothly moved within the range, enabling accurate microinjection and microelectrode positioning operations.
5. The three-axis mobile operation knobs are all on the same plane, making it easy to perform microscopic operations,
6. Equipped with additional locking devices in the Z-axis direction, it can prevent the micro manipulator from drifting in position in the Z-axis direction.
Technical Parameter
| Component Name | Mobile Range | Resolving Power |
| X-axis (fine adjustment) | 10mm | 0.01mm |
| X-axis | 37mm | 0.1mm |
| Y-axis | 20mm | 0.1mm |
| Z-axis | 25mm | 0.1mm |
| Model | Right Hand MY-33R;Left Hand M-33L | |
| Weight | 1.4KG | |